

- Stock: 11
- Brand: ELEPHANT
- Model: AGV

Compound Robot
It can be equipped with my series of robotic arms to realize mobile grabbing, expand the workspace, and enable it to complete more tasks.

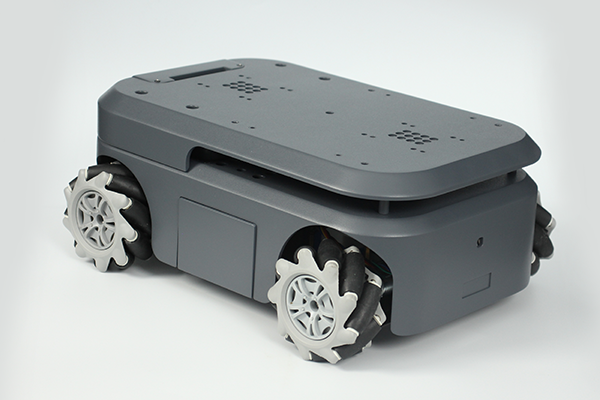
Omnidirectional movement
Competition-level Mecanum wheels, Fully Wrapped Metal Frame, Removable Split Structure.
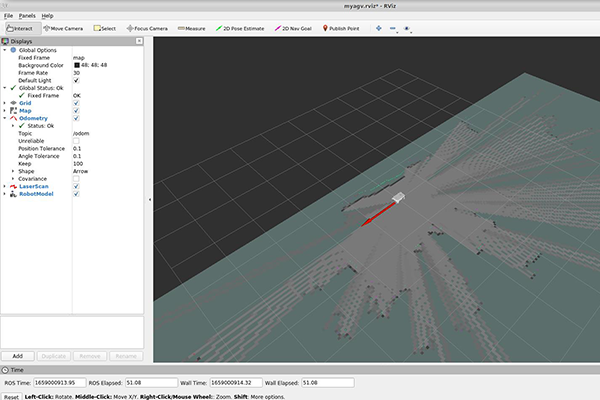
SLAM Lidar
The built-in gmapping and cartographer algorithms for ROS.Real-time mapping and scanning of Lidar, automatic path planning for obstacle avoidance and navigation.
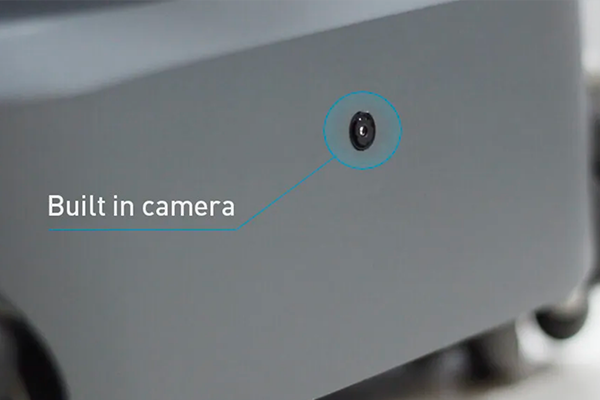
Built-in camera
5 million high-definition camera for object recognition and precise positioning.
MULTIPLE WAYS TO PLAY
The gamepad control supports multi-robots collaboration in real-time.

Additional extensions
Double-sided magazines on the body: increased batteries lengthen the working time; Can equip with the suction pump, and cooperate with the robotic arm to achieve more applications.

Cargo robot
Can carry and transport different sizes of cargo boxes arbitrarily, release your hands.
HARDWARE PARAMETERS

myAGV Unboxing
Instructions
Gitbook
[Recommended reading]

